近日,上海大学机电工程与自动化学院、上海市智能制造及机器人重点实验室王洁羽副教授、田应仲教授团队,在机器人顶级期刊《IEEE Transactions on Robotics》(T-RO)上发表了题为“A Pill bug-inspired Two-mode Mobile Robot Covered with Sliding Curvy Shells”的变形机器人最新研究成果。成果第一完成单位为上海大学机电工程与自动化学院上海市智能制造及机器人重点实验室,王洁羽副教授为论文第一作者,上海理工大学赵胤君老师为论文通讯作者。
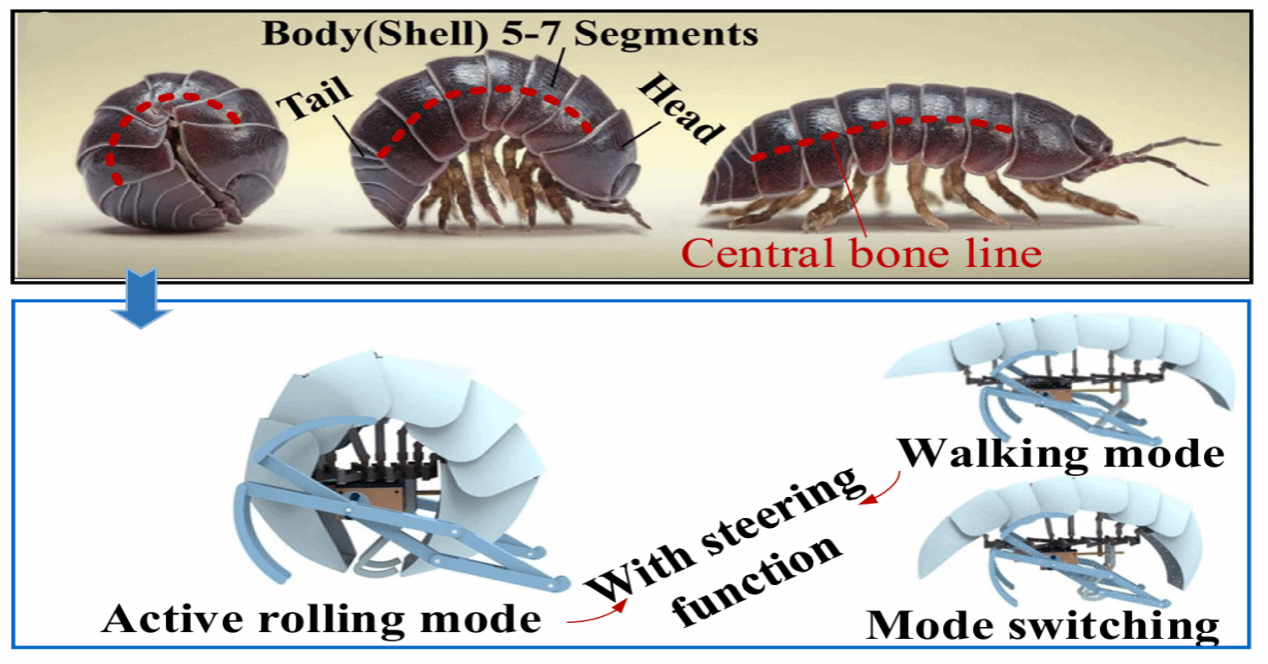
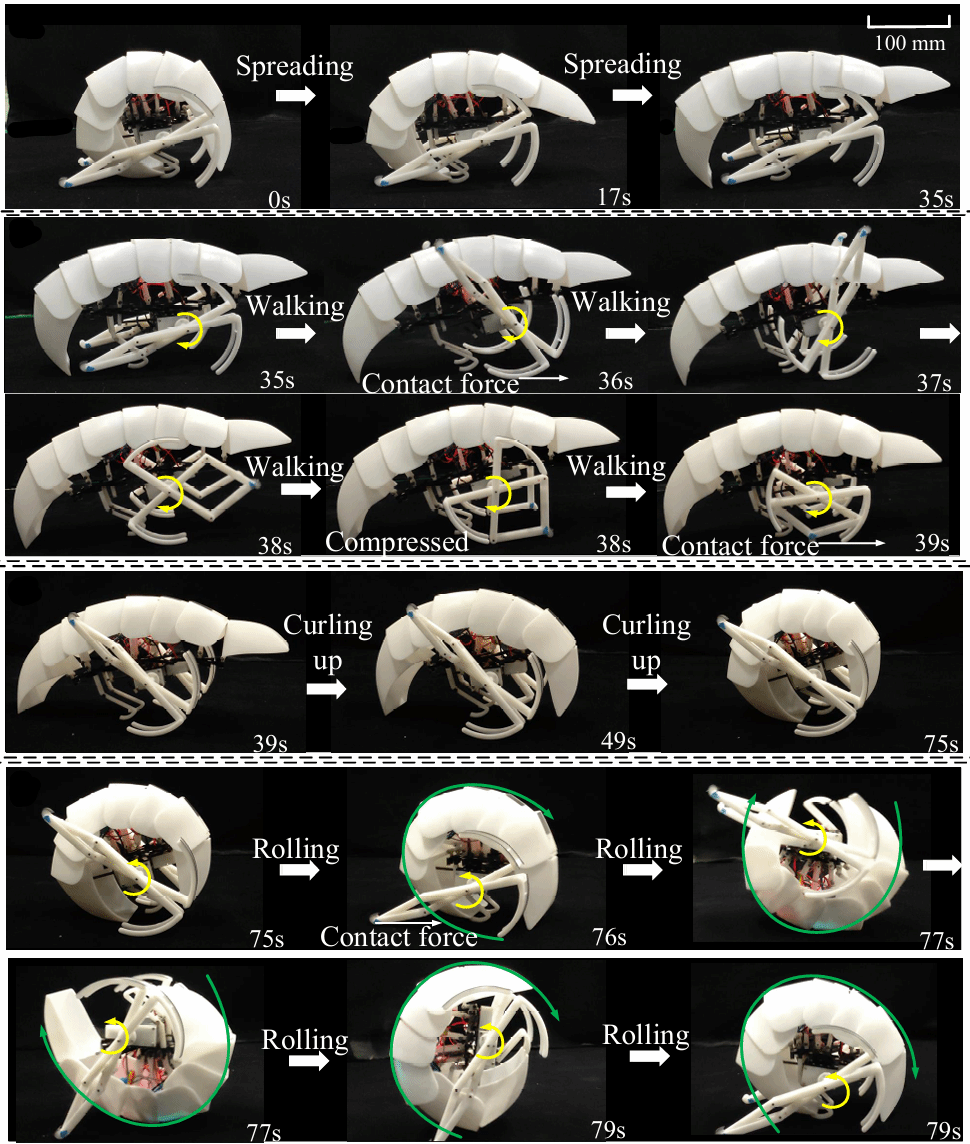
现有的卷曲变形机器人往往面临驱动器数量庞大、控制系统复杂,或仅能实现被动滚动(无法主动驱动滚动)等挑战,限制了其在实际非结构化环境中的应用能力。针对这一问题,研究团队受自然界鼠妇(西瓜虫)的“卷曲—展开”行为及分节外壳结构的启发,提出了一种覆盖滑动曲面外壳的新型双模式变形机器人。该设计创新性地采用了一种单自由度(1-DOF)多环耦合机构来模拟鼠妇的变形,并结合了一套独特的自适应腿部机构以实现多模式运动。该系统仅需3个驱动器,即可实现机器人在“展开行走”与“卷曲主动滚动”两种运动模式间的无缝切换,同时保证了刚性外壳在变形过程中始终紧密覆盖内部机构,提供持续的物理防护。该研究为开发兼具高机动性与高防护能力的微小型仿生机器人提供了全新的设计思路与理论基础。
研究亮点:
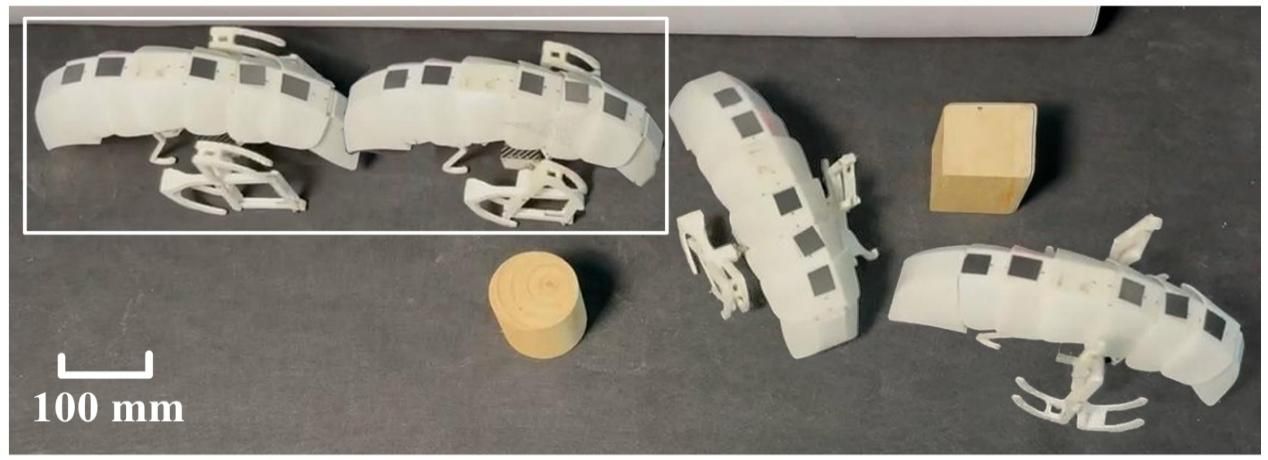
(1)极简驱动下的多功能集成,大幅降低了重量(样机仅715g)与控制复杂度。
(2)仿生滑动外壳防护机制,其刚性防护结构的抗压与抗冲击能力显著优于柔性蒙皮结构。
(3)高效滚动的球体形态+稳定行走的足式形态极大提升了机器人在复杂地形中的机动效率与越障能力。
论文链接:https://ieeexplore.ieee.org/document/11373213






