近日,上海大学计算机工程与科学学院谢少荣教授主持的国家自然科学基金重大项目“复杂海况无人艇集群控制理论与应用”结题审查会在上海召开。
国家自然科学基金委信息科学部常务副主任刘克、信息科学部综合与战略规划处处长张丽佳、信息科学部二处处长吴国政、副处长王志衡等基金委领导与工作人员,以及项目评审专家,上海大学党委书记成旦红、副校长张建华、科研管理部常务副部长张新鹏、基础与国际合作处处长甄强以及课题负责人山东大学张伟教授、华中科技大学苏厚胜教授、中国科学院沈阳自动化研究所唐延东研究员、北京理工大学俞成浦教授及项目骨干参加会议。会议由信息科学部综合与战略规划处张丽佳处长主持。
国家自然科学基金委信息科学部常务副主任刘克致辞时表示,基础研究是科技自立自强的根基,重大项目应聚焦国家战略需求与世界科技前沿,强调目标导向、问题导向与系统性部署,产出原创性和突破性成果。强调新时代科技工作者应传承初心使命,勇于攻克关键核心技术,推动科学基金改革走深走实。他期望项目组总结经验、规划未来,在服务国家海洋强国战略中做出更大贡献。

成旦红书记代表上海大学对基金委及专家组的指导与支持表示感谢,介绍了学校在智能无人系统与人工智能交叉领域的科研基础,特别指出无人艇团队在服务海洋强国建设战略中的重要贡献。成书记希望专家组“多浇灌智慧、多把脉定向”,助力团队在海洋场景感知理解、无人艇集群信息交互认知、集群决策控制和虚实验证平台等关键方向实现理论突破与技术领跑,推动海洋科技创新成果持续攀越高峰。

项目负责人谢少荣教授介绍了项目计划任务完成情况,详细汇报了项目在单艇感知能力、多艇交互认知、集群协同控制、多元智能融合、集群验证平台等方面取得的突破性创新研究成果。山东大学张伟教授、华中科技大学苏厚胜教授、中国科学院沈阳自动化研究所唐延东研究员、北京理工大学俞成浦教授、上海大学谢少荣教授分别汇报了该项目五个课题“复杂海况下海洋环境智能感知方法研究”、“复杂海况单艇准确完备自主感知机理研究”、“复杂海况多艇实时交互认知机制研究”、“复杂海况无人艇集群智能协同控制决策方法研究”与“复杂海况典型无人艇集群应用验证平台研究”的结题研究情况与取得的研究成果。

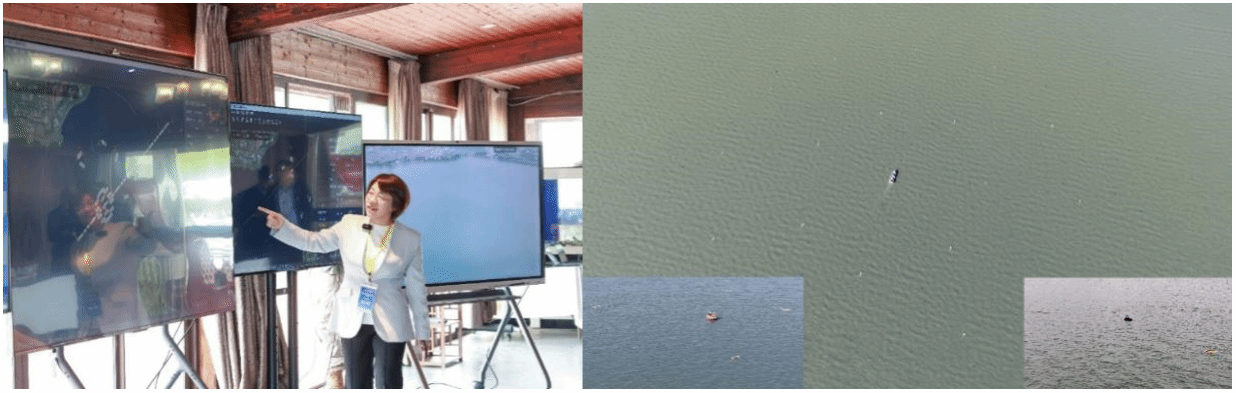
随后,专家组与基金委领导一同前往位于淀山湖的无人艇集群协同护航高价值目标的演示现场,考察了20艘无人艇集群在护航高价值目标遇到入侵无人艇集群(5艘)时,开展抵近侦察,识别入侵目标及危险等级,实施跟踪驱离、协同围捕,成功实现典型海洋场景应用验证,综合展示了项目理论与关键技术突破及性能指标显著提升的实施效果。
后续,项目团队将以此重大项目为基础,吸取各位专家给出的宝贵意见,继续自觉把学术追求融入建设科技强国的伟大事业,锐意进取,勇挑重担,为新形势下海洋强国建设和海洋船舶领域高质量发展,为维护国家海洋权益,捍卫国家主权和国防安全做出新的贡献。(计算机工程与科学学院 余航)






